Разработан сотрудниками ООО «СТС» в рамках выполнения составной части научно-исследовательской и опытно-конструкторской работы (НИОКР) «Создание научно-технического задела в области видеоаналитики, машинного обучения и высокоточного позиционирования с применением средств технического зрения» в инициативном порядке.
Цель НИОКР: Разработка и создание перспективных комплексов автоматической обработки видеопотока и изображений с применением средств и методов машинного зрения отечественного производства.
Назначение
- поиск, обнаружение, идентификация, сопровождение, определение координат и параметров движения с прогнозированием траектории движения людей, подвижных и неподвижных транспортных средств, и других объектов в области видимости средств технического зрения;
- автономное передвижение беспилотного транспортного средства с использованием карты глубин;
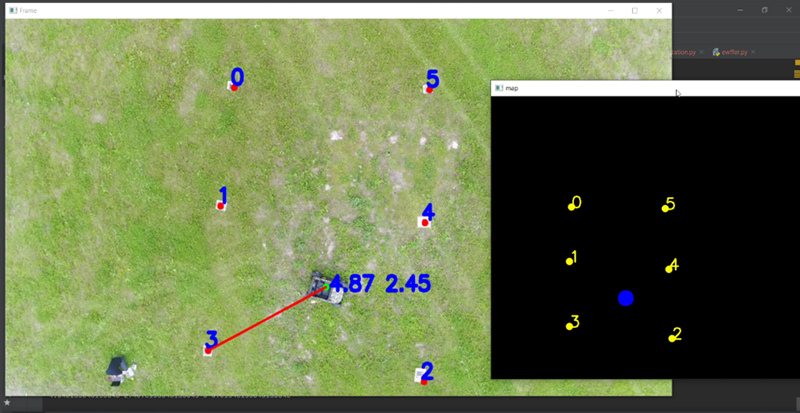
- навигация беспилотных летательных аппаратов по данным аэрофотосъемки в условиях отсутствия сигналов внешних навигационных систем;
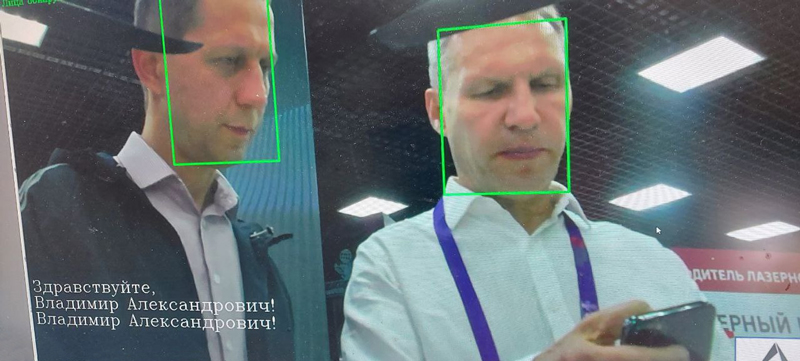
- автоматическое выделение в режиме реального времени участков кадра в видеопотоке, на которых определены объекты типа «лицо»;
- идентификация личности путём сравнения с известными наборами изображений лиц с применением обученной нейронной сети и последующей обработкой, сохранением в памяти ЭВМ и выводом результата обработки;
- классификация по изображению и/или видеопотоку транспортных средств по цвету, типу, марке, модели, углу ориентации ТС и другим характеристикам;
- обнаружение и распознавание государственных регистрационных знаков, включая страну принадлежности транспортного средства;
- классификация по изображению и/или видеопотоку дорожных знаков по цвету, форме и типу;
- определение координат собственного местоположения с помощью одометрии;
- определение координат транспортного средства, скорости движения, регистрации траектории движения и её экстраполяции с помощью внешних камер;
- определение координат собственного местоположения по геопривязанным меткам;
- определение координат объектов интереса по геопривязанным меткам без знания собственного местоположения.
Где СПО АПК может устанавливаться
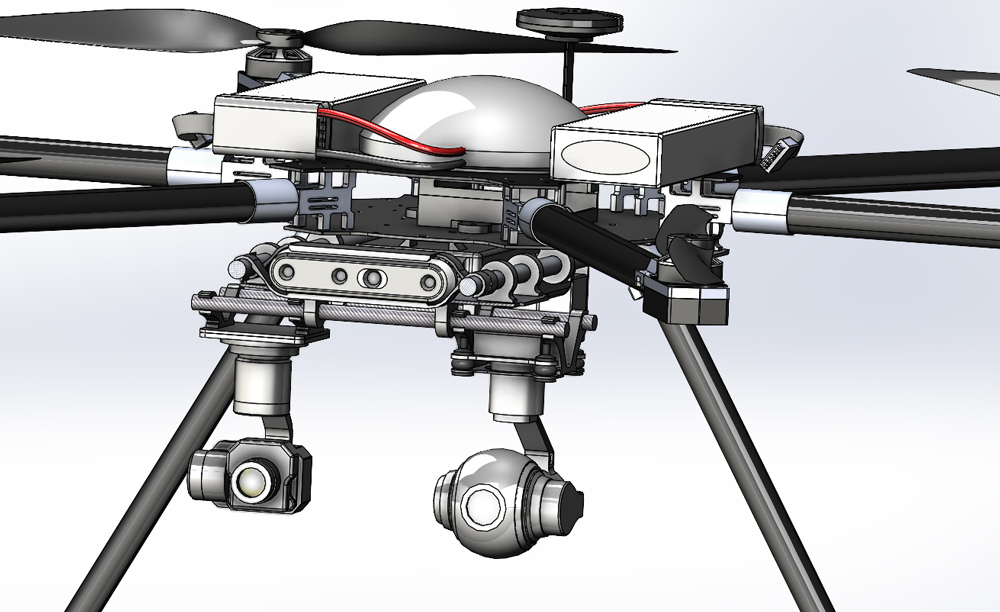
- на беспилотных летательных аппаратах;
- автодорожных транспортных средствах;
- специальных транспортных средствах;
- горно-транспортных машинах горнодобывающей промышленности; ссылка на пример.
- средствах управления дорожным движением;
- других средствах в соответствии с сервисами, предоставляемыми АПК.


Демонстрационные примеры работы АПК
Идентификация личности:
Распознавание дорожных знаков:

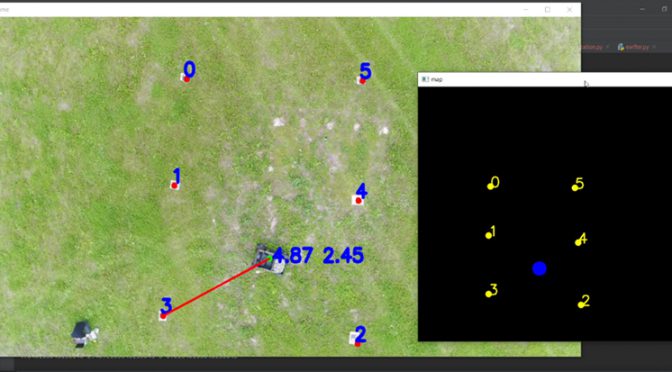
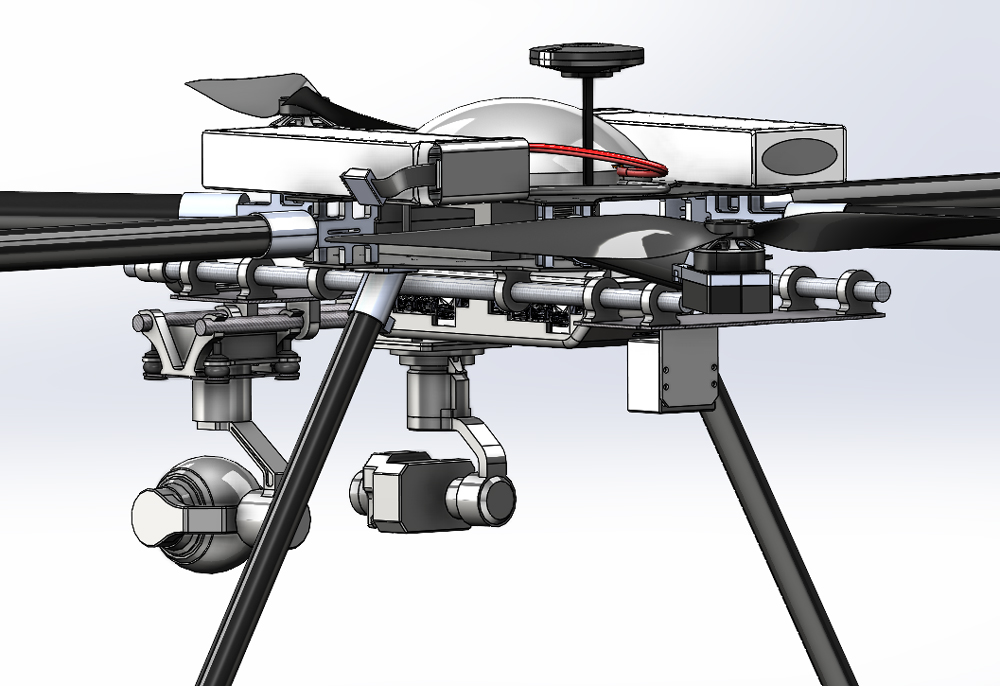
Распознавание объектов с камеры, закрепленной на БПЛА:

Определение загруженности вагонеток:
Определение собственных координат без знания собственного местоположения:
Определение координат объектов интереса по геопривязанным меткам без знания собственного местоположения:
Взаимодействие со сторонним ПО
СПО АПК технического зрения для БТС взаимодействует с нейросетевыми модулями YOLO версий 4 и 5, программным модулем обработчика пакетов MAVLink.
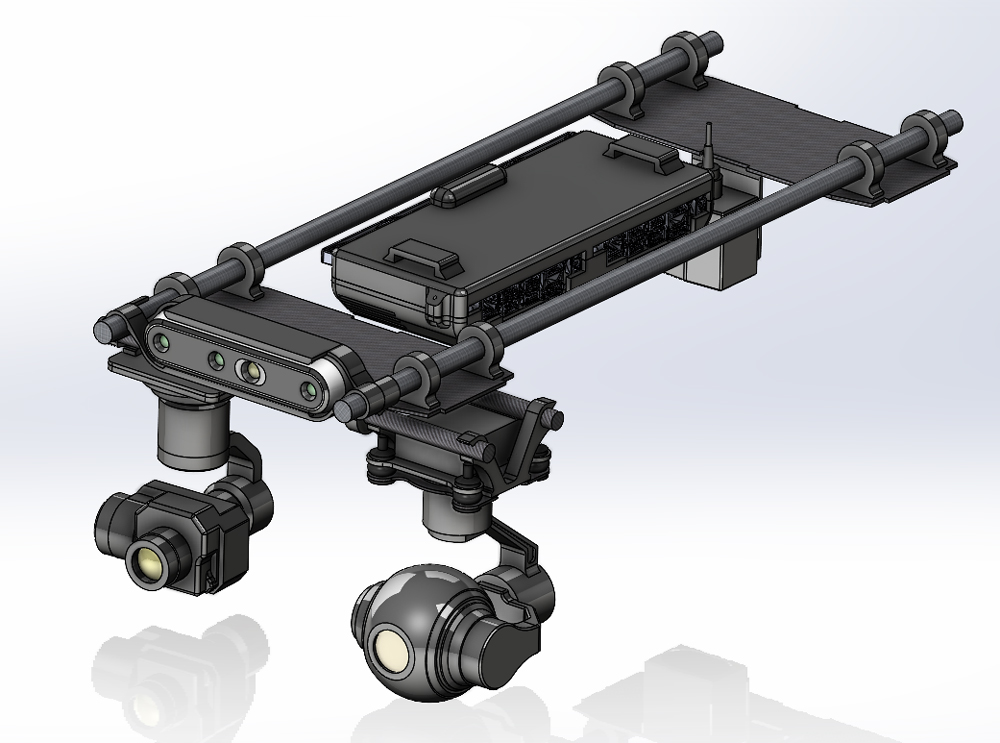
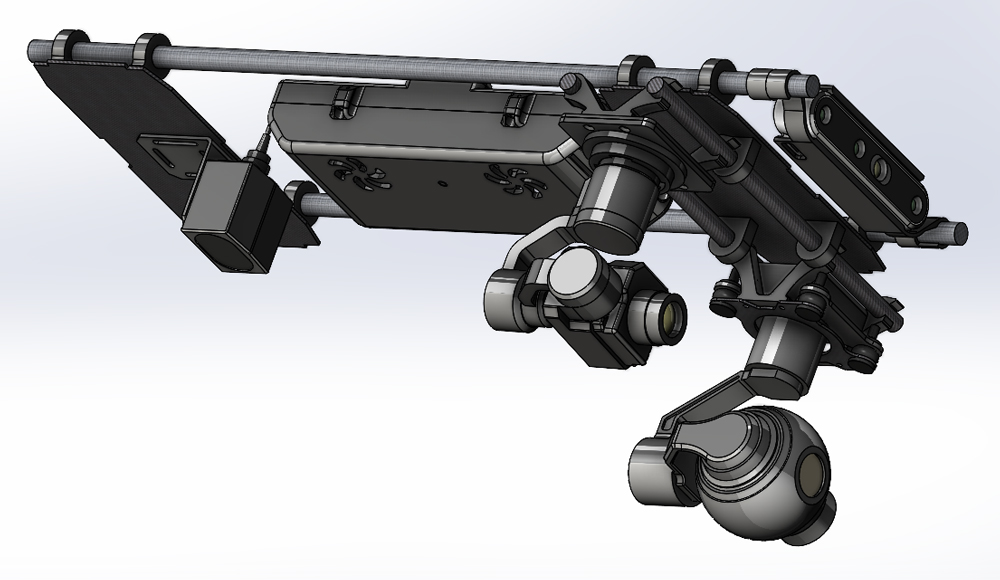
Используемые технические средства
СПО АПК технического зрения для БТС исполняется на борту беспилотного транспортного средства вычислительными мощностями NVIDIA Jetson Xavier. Чтение, запись обрабатываемых данных, а также хранение дополнительных программных модулей на твердотельном носителе. Для работы в диалоговом режиме используется экран дисплея, клавиатура и манипулятор типа «мышь». Программа работает под управлением ОС MS Windows Vista, 7, 8.1, 10, 11.
Регистрация прав собственности на СПО АПК
Права интеллектуальной собственности ООО «СТС» на СПО АПК зарегистрированы в реестре программ для ЭВМ Федеральной службой по интеллектуальной собственности.
Планы
В настоящее время ООО «СТС» готовит организационную и техническую базу для обеспечения серийного производства АПК.